LeRobot具身智能
1.端侧环境搭建
1.1 创建虚拟环境
使用 Python 3.10 创建一个虚拟环境并激活它,例如使用 miniforge:
conda create -y -n lerobot python=3.10
conda activate lerobot
使用 时,在您的环境中安装:conda``ffmpeg
conda install ffmpeg -c conda-forge
**注意:**这通常适用于使用编码器编译的平台。如果不受支持(检查支持的编码器 ),您可以:
ffmpeg 7.X``libsvtav1``libsvtav1``ffmpeg -encoders
- *[在任何平台上]*使用以下方式显式安装:
ffmpeg 7.Xconda install ffmpeg=7.1.1 -c conda-forge
- *[仅限 Linux]*使用 libsvtav1 安装 ffmpeg 构建依赖项并从源代码编译 ffmpeg,并确保使用 .
which ffmpeg
1.2 安装 LeRobot
克隆存储库并进入源码目录:
git clone -b v0.4.0 https://github.com/huggingface/lerobot.git
cd lerobot
以可编辑模式安装库:
pip install -e .
从 PyPI 安装:
pip install lerobot
**额外功能:**若要安装其他功能,请使用以下选项之一:
pip install 'lerobot[all]' # All available features
pip install 'lerobot[aloha,pusht]' # Specific features (Aloha & Pusht)
pip install 'lerobot[feetech]' # Feetech motor support
将 [...] 替换为所需的功能。
对于 lerobot 0.4.0,如果您想安装 libero 或 pi,您必须执行以下作:
pip install "lerobot[pi,libero]@git+https://github.com/huggingface/lerobot.git"
故障 排除
如果遇到构建错误,可能需要安装其他依赖项:、 和 。 要为 Linux 安装这些,请运行:cmake``build-essential``ffmpeg libs
sudo apt-get install cmake build-essential python-dev pkg-config libavformat-dev libavcodec-dev libavdevice-dev libavutil-dev libswscale-dev libswresample-dev libavfilter-dev pkg-config
对于其他系统,请参阅:编译 PyAV
1.3 可选依赖项
LeRobot 为特定功能提供可选的附加功能。可以组合多个附加功能(例如,)。有关所有可用的附加功能,请参阅 。.[aloha,feetech]``pyproject.toml
模拟
安装环境包:(gym-aloha) 或 (gym-pusht) 例:aloha``pusht
pip install -e ".[aloha]" # or "[pusht]" for example
电机控制
对于 Koch v1.1,请安装 Dynamixel SDK,对于 SO100/SO101/Moss,请安装 Feetech SDK。
pip install -e ".[feetech]" # or "[dynamixel]" for example
实验跟踪
要使用权重和偏差进行实验跟踪,请使用
wandb login
如果机器人尚未准备好,您现在可以组装机器人,请在左侧查找您的机器人类型。然后点击下面的链接将 Lerobot 与您的机器人一起使用。
安装GPU基础库。
sudo apt update
sudo apt install -y libvulkan1 vulkan-tools mesa-vulkan-drivers mesa-utils
2.舵机适配
Lerobot官方文档参考:SO-101
2.1 查找舵机控制器
开始前请安装好舵机,并将舵机控制器连接至DshanPI A1开发板的USB口中。执行如下命令:
lerobot-find-port
运行效果:
(lerobot) baiwen@dshanpi-a1:~/lerobot$ lerobot-find-port
Finding all available ports for the MotorsBus.
Ports before disconnecting: ['/dev/ttyACM0', '/dev/ttyS7', '/dev/ttyS4', '/dev/tty63', '/dev/tty62', '/dev/tty61', '/dev/tty60', '/dev/tty59', '/dev/tty58', '/dev/tty57', '/dev/tty56', '/dev/tty55', '/dev/tty54', '/dev/tty53', '/dev/tty52', '/dev/tty51', '/dev/tty50', '/dev/tty49', '/dev/tty48', '/dev/tty47', '/dev/tty46', '/dev/tty45', '/dev/tty44', '/dev/tty43', '/dev/tty42', '/dev/tty41', '/dev/tty40', '/dev/tty39', '/dev/tty38', '/dev/tty37', '/dev/tty36', '/dev/tty35', '/dev/tty34', '/dev/tty33', '/dev/tty32', '/dev/tty31', '/dev/tty30', '/dev/tty29', '/dev/tty28', '/dev/tty27', '/dev/tty26', '/dev/tty25', '/dev/tty24', '/dev/tty23', '/dev/tty22', '/dev/tty21', '/dev/tty20', '/dev/tty19', '/dev/tty18', '/dev/tty17', '/dev/tty16', '/dev/tty15', '/dev/tty14', '/dev/tty13', '/dev/tty12', '/dev/tty11', '/dev/tty10', '/dev/tty9', '/dev/tty8', '/dev/tty7', '/dev/tty6', '/dev/tty5', '/dev/tty4', '/dev/tty3', '/dev/tty2', '/dev/tty1', '/dev/tty0', '/dev/tty', '/dev/ttyFIQ0']
Remove the USB cable from your MotorsBus and press Enter when done.
#此时将舵机控制器的USB断开,再按下回车键。
The port of this MotorsBus is '/dev/ttyACM0'
Reconnect the USB cable.
可以看到/dev/ttyACM0,该设备为串行总线舵机控制器的设备号。
2.2 设置舵机 ID 和波特率
设置设备访问权限:
sudo chmod 666 /dev/ttyACM*
当舵机为全新时,舵机一般都会带有默认ID,为了让舵机和舵机控制器之间可以正常工作,控制器和所有电机配置相同的波特率。
使用控制器单独链接每个点击,将参数写入电机内部存储器中。
lerobot-setup-motors \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0
参考如下视频:Lerobot官方文档 Setup motors video
对于主动臂设置如下:
lerobot-setup-motors \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 #请确保主动臂的设备号
2.2 校准机械臂
校准从动臂:
lerobot-calibrate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm
参考如下视频:Lerobot官方文档 Calibration video
对于校准主动臂:
lerobot-calibrate \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm
2.3 遥控机械臂
在终端执行以下命令,操作主臂时,从动臂也会跟随移动。
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm
3.拓展相机
3.1 查找摄像头
查找插入DshanPI A1的摄像机的摄像机索引,运行以下命令:
lerobot-find-cameras opencv
输出内容如下:
(lerobot) baiwen@dshanpi-a1:~/lerobot$ lerobot-find-cameras opencv
--- Detected Cameras ---
Camera #0:
Name: OpenCV Camera @ /dev/video0
Type: OpenCV
Id: /dev/video0
Backend api: V4L2
Default stream profile:
Format: 0.0
Fourcc: YV12
Width: 64
Height: 64
Fps: -1.0
--------------------
Camera #1:
Name: OpenCV Camera @ /dev/video1
Type: OpenCV
Id: /dev/video1
Backend api: V4L2
Default stream profile:
Format: 0.0
Fourcc: YV12
Width: 64
Height: 64
Fps: -1.0
--------------------
Camera #2:
Name: OpenCV Camera @ /dev/video10
Type: OpenCV
Id: /dev/video10
Backend api: V4L2
Default stream profile:
Format: 0.0
Fourcc: YV12
Width: 64
Height: 64
Fps: -1.0
--------------------
Camera #3:
Name: OpenCV Camera @ /dev/video11
Type: OpenCV
Id: /dev/video11
Backend api: V4L2
Default stream profile:
Format: 0.0
Fourcc: YUYV
Width: 640
Height: 480
Fps: 30.0
--------------------
(more cameras ...)
Finalizing image saving...
Image capture finished. Images saved to outputs/captured_images
由于板载了HDMI IN,也会出现设备节点在其中,你可以通过拔插USB摄像头确定设备号,我这里使用的是/dev/video11。可以在outputs/captured_images目录下,看到拍摄的图片opencv__dev_video11.png。
(lerobot) baiwen@dshanpi-a1:~/lerobot/outputs/captured_images$ ls
opencv__dev_video11.png
3.2 使用摄像头
新建程序文件UseCameras.py,填入以下内容:
from lerobot.cameras.opencv.configuration_opencv import OpenCVCameraConfig
from lerobot.cameras.opencv.camera_opencv import OpenCVCamera
from lerobot.cameras.configs import ColorMode, Cv2Rotation
# Construct an `OpenCVCameraConfig` with your desired FPS, resolution, color mode, and rotation.
config = OpenCVCameraConfig(
index_or_path=11,
fps=30,
width=1920,
height=1080,
color_mode=ColorMode.RGB,
rotation=Cv2Rotation.NO_ROTATION,
fourcc="MJPG"
)
# Instantiate and connect an `OpenCVCamera`, performing a warm-up read (default).
camera = OpenCVCamera(config)
camera.connect()
# Read frames asynchronously in a loop via `async_read(timeout_ms)`
try:
for i in range(10):
frame = camera.async_read(timeout_ms=200)
print(f"Async frame {i} shape:", frame.shape)
finally:
camera.disconnect()
运行效果:
(lerobot) baiwen@dshanpi-a1:~/lerobot/outputs/captured_images$ python3 UseCameras.py
Async frame 0 shape: (1920, 1080, 3)
Async frame 1 shape: (1920, 1080, 3)
Async frame 2 shape: (1920, 1080, 3)
Async frame 3 shape: (1920, 1080, 3)
Async frame 4 shape: (1920, 1080, 3)
Async frame 5 shape: (1920, 1080, 3)
.......
FAQ:
1.RuntimeError: OpenCVCamera(11) failed to set fps=15 (actual_fps=10.0).
具体报错:
(lerobot) baiwen@dshanpi-a1:~/lerobot/outputs/captured_images$ python3 UseCameras.py
Traceback (most recent call last):
File "/home/baiwen/lerobot/outputs/captured_images/UseCameras.py", line 17, in <module>
camera.connect()
File "/home/baiwen/lerobot/src/lerobot/cameras/opencv/camera_opencv.py", line 172, in connect
self._configure_capture_settings()
File "/home/baiwen/lerobot/src/lerobot/cameras/opencv/camera_opencv.py", line 226, in _configure_capture_settings
self._validate_fps()
File "/home/baiwen/lerobot/src/lerobot/cameras/opencv/camera_opencv.py", line 241, in _validate_fps
raise RuntimeError(f"{self} failed to set fps={self.fps} ({actual_fps=}).")
RuntimeError: OpenCVCamera(11) failed to set fps=5 (actual_fps=10.0).
解决办法:修改代码中fps=15为fps=15。
2.TimeoutError: Timed out waiting for frame from camera OpenCVCamera(11) after 200 ms. Read thread alive: True.
具体报错:
(lerobot) baiwen@dshanpi-a1:~/lerobot/outputs/captured_images$ python3 UseCameras.py
Async frame 0 shape: (1080, 1920, 3)
Traceback (most recent call last):
File "/home/baiwen/lerobot/outputs/captured_images/UseCameras.py", line 22, in <module>
frame = camera.async_read(timeout_ms=200)
File "/home/baiwen/lerobot/src/lerobot/cameras/opencv/camera_opencv.py", line 507, in async_read
raise TimeoutError(
TimeoutError: Timed out waiting for frame from camera OpenCVCamera(11) after 200 ms. Read thread alive: True.
解决办法:降低图像分辨率,将代码中的 width=1920和height=1080修改为: width=1280和height=720。
4.可视化摄像头和机械臂
安装Dynamixel库,用于伺服电机进行通信,在终端执行:
pip install dynamixel-sdk
可视化摄像头并实现遥控机械臂,在终端执行:
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 11, width: 1920, height: 1080, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
如果需要调整分辨率和帧率可修改cameras中的参数:
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 11, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
注意:使用 CPU 软渲染 + CPU 解码相机,两头吃力就会卡。把显示和解码负载降下来,立刻就顺畅很多。ji即修改参数--display_data=false
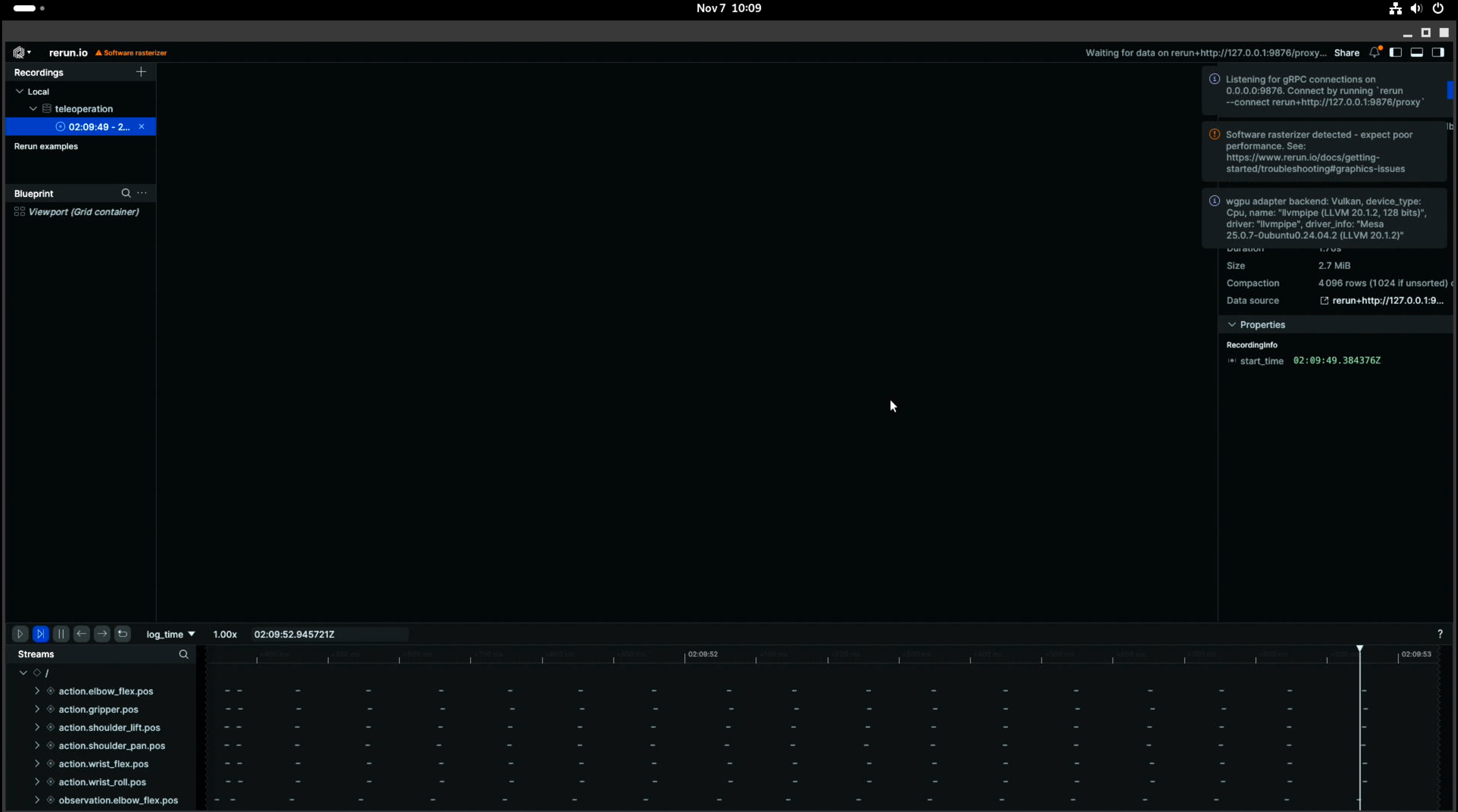
执行完成后,会启动如下画面:
如果想看到摄像头的画面,需要找到Blueprint选项框的...,选择其中的Add View or container后,选择2D。如下所示:
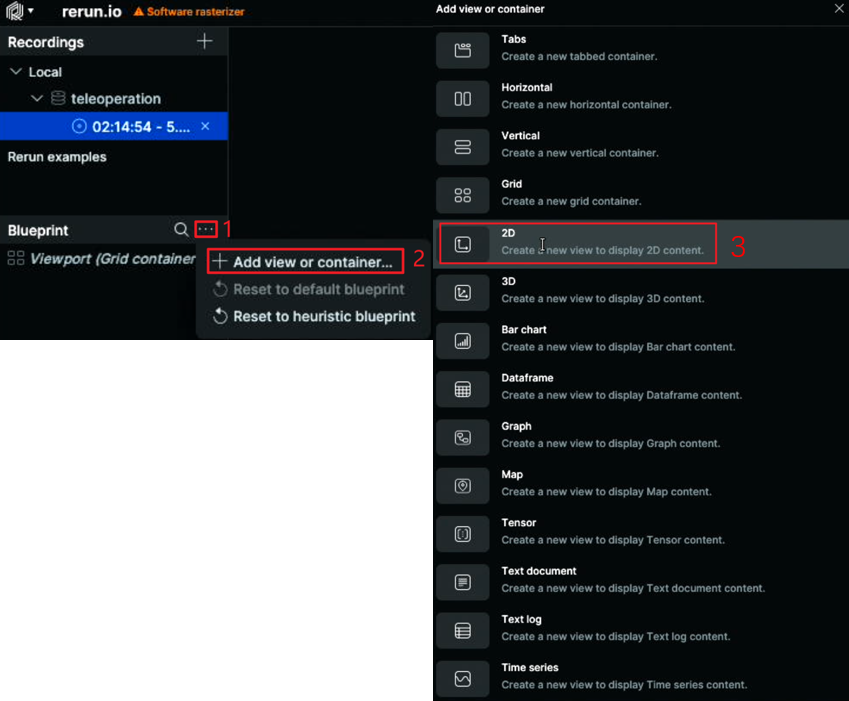
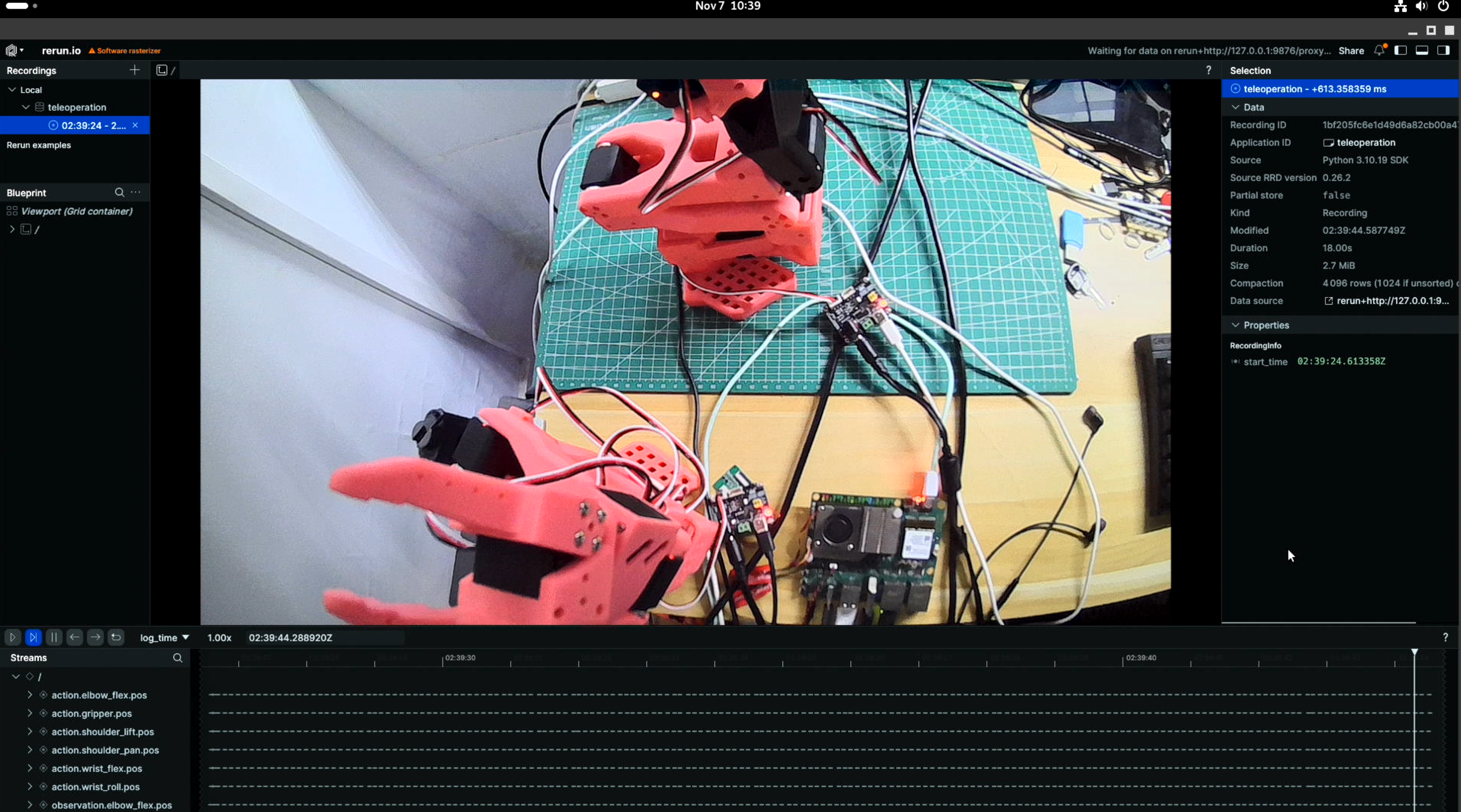
选择完成后可在界面中看到摄像头实时预览画面。
5.主机端环境搭建
5.1 环境搭建
由于我们需要采集数据进行训练,需要用到NVIDIA GPU,所以建议在主机端搭建环境采集数据。
git clone https://github.com/100askTeam/lerobot.git
使用 Python 3.10 创建一个虚拟环境并激活它,例如使用 miniforge:
conda create -y -n lerobot python=3.10
conda activate lerobot
使用时,在您的环境中安装:conda``ffmpeg
conda install ffmpeg -c conda-forge
**注意:**这通常适用于使用编码器编译的平台。如果不受支持(检查支持的编码器 ),您可以:
ffmpeg 7.X``libsvtav1``libsvtav1``ffmpeg -encoders
- *[在任何平台上]*使用以下方式显式安装:
ffmpeg 7.Xconda install ffmpeg=7.1.1 -c conda-forge
- *[仅限 Linux]*使用 libsvtav1 安装 ffmpeg 构建依赖项并从源代码编译 ffmpeg,并确保使用 .
which ffmpeg
单独安装pytorch和cuda:
pip install torch==2.7.1 torchvision==0.22.1 torchaudio==2.7.1 --index-url https://download.pytorch.org/whl/cu126
进入源码目录:
cd lerobot
以可编辑模式安装库:
pip install -e .
从 PyPI 安装:
pip install lerobot
**额外功能:**若要安装其他功能,请使用以下选项之一:
pip install -e ".[aloha, pusht, xarm]" # Specific features (Aloha & Pusht)
pip install -e ".[feetech]" # Feetech motor support
pip install -e ".[all]"
将 [...] 替换为所需的功能。
对于 lerobot 0.4.0,如果您想安装 libero 或 pi,您必须执行以下作:
pip install "lerobot[pi,libero]@git+https://github.com/huggingface/lerobot.git"
故障 排除
如果遇到构建错误,可能需要安装其他依赖项。 要为 Linux 安装这些,请运行:cmake``build-essential``ffmpeg libs
sudo apt-get install cmake build-essential python-dev pkg-config libavformat-dev libavcodec-dev libavdevice-dev libavutil-dev libswscale-dev libswresample-dev libavfilter-dev pkg-config
对于其他系统,请参阅:编译 PyAV
5.2 检查配置
开始前请安装好舵机,并将舵机控制器连接至DshanPI A1开发板的USB口中。执行如下命令:
lerobot-find-port
运行效果:
(lerobot) D:\Programmers\Robot\lerobot>lerobot-find-port
Finding all available ports for the MotorsBus.
Ports before disconnecting: ['COM1', 'COM8', 'COM13']
Remove the USB cable from your MotorsBus and press Enter when done.
#此时将舵机控制器的USB断开,再按下回车键。
The port of this MotorsBus is 'COM8'
Reconnect the USB cable.
这里我通过命令获取从动臂为COM8、主动臂COM13。
校准从动臂:
lerobot-calibrate --robot.type=so101_follower --robot.port=COM8 --robot.id=my_awesome_follower_arm
对于校准主动臂:
lerobot-calibrate --teleop.type=so101_leader --teleop.port=COM13 --teleop.id=my_awesome_leader_arm
在终端执行以下命令,操作主臂时,从动臂也会跟随移动。
lerobot-teleoperate --robot.type=so101_follower --robot.port=COM8 --robot.id=my_awesome_follower_arm --teleop.type=so101_leader --teleop.port=COM13 --teleop.id=my_awesome_leader_arm
查看摄像头
lerobot-find-cameras opencv
这里我通过查看,发现摄像头ID为0。
使用单个摄像头:
lerobot-teleoperate --robot.type=so101_follower --robot.port=COM8 --robot.id=my_awesome_follower_arm --robot.cameras="{ up: {type: opencv, index_or_path: 0, width: 1920, height: 1080, fps: 30, fourcc: "MJPG"}}" --teleop.type=so101_leader --teleop.port=COM13 --teleop.id=my_awesome_leader_arm --display_data=true
使用两个摄像头:
lerobot-teleoperate --robot.type=so101_follower --robot.port=COM8 --robot.id=my_awesome_follower_arm --robot.cameras="{ up: {type: opencv, index_or_path: 0, width: 1280, height: 720, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: 1, width: 1280, height: 720, fps: 30, fourcc: "MJPG"}}" --teleop.type=so101_leader --teleop.port=COM13 --teleop.id=my_awesome_leader_arm --display_data=true
5.采集数据集
记录10组数据:
lerobot-record --robot.type=so101_follower --robot.port=COM8 --robot.id=my_awesome_follower_arm --robot.cameras="{ up: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: 1, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" --teleop.type=so101_leader --teleop.port=COM13 --teleop.id=my_awesome_leader_arm --display_data=true --dataset.repo_id=baiwen/record-test --dataset.num_episodes=10 --dataset.single_task="Grab the green cube"
其中按下左箭头→即可完整录制进入下一步骤,重复录制数据,重置环境10次后即可。最后程序会自动上传到huggingface.co,由于网络问题,我们不变上传,会提示如下报错:
requests.exceptions.ConnectTimeout: (MaxRetryError("HTTPSConnectionPool(host='huggingface.co', port=443): Max retries exceeded with url: /api/repos/create (Caused by ConnectTimeoutError(<urllib3.connection.HTTPSConnection object at 0x0000025E2EDD8EB0>, 'Connection to huggingface.co timed out. (connect timeout=None)'))"), '(Request ID: bc41c711-2ba1-41be-9539-c4113ce0e165)')
此报错不影响,我们不上传数据,数据也会保存在我们的本地。
重播数据集:
lerobot-replay --robot.type=so101_follower --robot.port=COM8 --robot.id=my_awesome_follower_arm --dataset.repo_id=baiwen/record-test --dataset.episode=0
其中--dataset.episode=0为重播第0组数据,如果像重播其他数据修改最后的参数0,为对应的组即可。
可视化数据集:
lerobot-dataset-viz --repo-id baiwen/record-test --episode-index 0
6.在主机训练模型
使用带NVIDIA GPU的主机进行本地训练:
lerobot-train --dataset.repo_id=baiwen/record-test --policy.type=act --output_dir=outputs/train/act_so101_test --job_name=act_so101_test --policy.device=cuda --wandb.enable=false --policy.repo_id=baiwen/my_policy --dataset.push_to_hub=false --policy.push_to_hub=false
训练时间较长,在3060的8G Windows主机上训练ACT的10组数据的时间大概为8小时。运行效果如下: 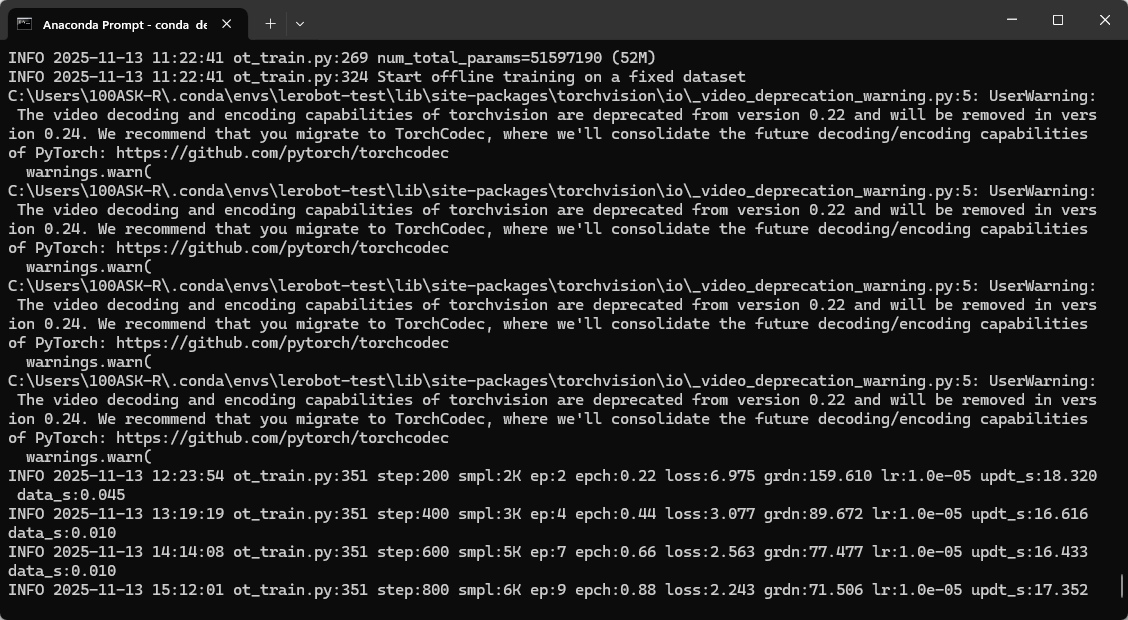
当然建议大家使用使用云平台GPU进行训练,训练时间更短,只需将程序上传云平台即可。如下所示:
训练到最后程序会自动上传到huggingface,但由于我们没有注册账号且无法连接到huggingface网站,会提示如下报错:
此报错不影响训练,模型已经训练完毕。
模型评估:
lerobot-record --robot.type=so100_follower --robot.port=COM8 --robot.cameras="{ up: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: 1, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" --robot.id=my_awesome_follower_arm --display_data=true --dataset.num_episodes=10 --dataset.repo_id=baiwen/eval_so101 --dataset.single_task="Put lego brick into the transparent box" --policy.path=outputs\train\act_so101_test\checkpoints\100000\pretrained_model --dataset.push_to_hub=false
7.模型转换
获取模型转换工具:
git clone https://github.com/100askTeam/rk_lerobot_tools.git
将工具源码rk_lerobot_tools拷贝至lerobot_目录下:
baiwen@dshanpi-a1:~$ cp rk_lerobot_tools/ lerobot/ -rf
7.1 ONNX模型转换
安装ONNX:
pip install onnx onnxsim termcolor
执行模型转换:
python rk_lerobot_tools/export_act_onnx.py --dataset.repo_id=baiwen/record-test --policy.type=act --policy.device=cpu --policy.repo_id=baiwen/eval_so101_act_export --wandb.enable=false
执行完成后可以在npu_onnx_export目录下看到导出的ONNX模型。
.
|-- NPU_ACTPolicy_TransformerLayers
| `-- NPU_ACTPolicy_TransformerLayers.onnx
|-- NPU_ACTPolicy_VisionEncoder
| `-- NPU_ACTPolicy_VisionEncoder.onnx
|-- new_actions.npy
`-- npu_output
3 directories, 3 files
7.2 RKNN模型转换
将npu_onnx_export文件夹拷贝至RKNN模型转换环境中,如下所示:
(base) baiwen@dshanpi-a1:~/lerobot/rk_lerobot_tools$ tree
.
├── convert_act_onnx_to_rknn.py
└── npu_onnx_export
├── new_actions.npy
├── NPU_ACTPolicy_TransformerLayers
│ └── NPU_ACTPolicy_TransformerLayers.onnx
├── NPU_ACTPolicy_VisionEncoder
│ └── NPU_ACTPolicy_VisionEncoder.onnx
└── npu_output
5 directories, 6 files
激活rknn模型转换环境:
conda activate rknn-toolkit2
执行模型转换程序:
python3 convert_act_onnx_to_rknn.py
运行效果如下:
(rknn-toolkit2) baiwen@dshanpi-a1:~/lerobot/rk_lerobot_tools$ python3 convert_act_onnx_to_rknn.py
=================================================
ONNX -> RKNN
ONNX : npu_onnx_export/NPU_ACTPolicy_VisionEncoder/NPU_ACTPolicy_VisionEncoder.onnx
RKNN : npu_onnx_export/NPU_ACTPolicy_VisionEncoder.rknn
=================================================
I rknn-toolkit2 version: 2.3.2
--> Config RKNN
--> Loading ONNX model
I Loading : 100%|█████████████████████████████████████████████████| 62/62 [00:00<00:00, 2569.56it/s]
W load_onnx: The config.mean_values is None, zeros will be set for input 0!
W load_onnx: The config.std_values is None, ones will be set for input 0!
Load ONNX done
--> Building RKNN without quantization (float)
I OpFusing 0: 100%|██████████████████████████████████████████████| 100/100 [00:00<00:00, 303.69it/s]
I OpFusing 1 : 100%|█████████████████████████████████████████████| 100/100 [00:00<00:00, 266.35it/s]
I OpFusing 2 : 100%|██████████████████████████████████████████████| 100/100 [00:07<00:00, 12.58it/s]
I rknn building ...
I rknn building done.
Build RKNN done
--> Export RKNN
Export RKNN done: npu_onnx_export/NPU_ACTPolicy_VisionEncoder.rknn
=================================================
=================================================
ONNX -> RKNN
ONNX : npu_onnx_export/NPU_ACTPolicy_TransformerLayers/NPU_ACTPolicy_TransformerLayers.onnx
RKNN : npu_onnx_export/NPU_ACTPolicy_TransformerLayers.rknn
=================================================
I rknn-toolkit2 version: 2.3.2
--> Config RKNN
--> Loading ONNX model
I Loading : 100%|█████████████████████████████████████████████████| 98/98 [00:00<00:00, 1351.41it/s]
W load_onnx: The config.mean_values is None, zeros will be set for input 0!
W load_onnx: The config.std_values is None, ones will be set for input 0!
W load_onnx: The config.mean_values is None, zeros will be set for input 1!
W load_onnx: The config.std_values is None, ones will be set for input 1!
W load_onnx: The config.mean_values is None, zeros will be set for input 2!
W load_onnx: The config.std_values is None, ones will be set for input 2!
Load ONNX done
--> Building RKNN without quantization (float)
I OpFusing 0: 100%|███████████████████████████████████████████████| 100/100 [00:02<00:00, 46.12it/s]
I OpFusing 1 : 100%|██████████████████████████████████████████████| 100/100 [00:04<00:00, 22.27it/s]
I OpFusing 0 : 100%|██████████████████████████████████████████████| 100/100 [00:10<00:00, 9.86it/s]
I OpFusing 1 : 100%|██████████████████████████████████████████████| 100/100 [00:10<00:00, 9.68it/s]
I OpFusing 0 : 100%|██████████████████████████████████████████████| 100/100 [00:12<00:00, 7.95it/s]
I OpFusing 1 : 100%|██████████████████████████████████████████████| 100/100 [00:12<00:00, 7.92it/s]
I OpFusing 2 : 100%|██████████████████████████████████████████████| 100/100 [00:12<00:00, 7.83it/s]
I OpFusing 0 : 100%|██████████████████████████████████████████████| 100/100 [00:13<00:00, 7.29it/s]
I OpFusing 1 : 100%|██████████████████████████████████████████████| 100/100 [00:13<00:00, 7.25it/s]
I OpFusing 2 : 100%|██████████████████████████████████████████████| 100/100 [00:28<00:00, 3.49it/s]
I rknn building ...
I rknn building done.
Build RKNN done
--> Export RKNN
Export RKNN done: npu_onnx_export/NPU_ACTPolicy_TransformerLayers.rknn
=================================================
All RKNN models build success.
转换完成后,可以在npu_onnx_export目录下,看到转换完成的rknn模型。
(rknn-toolkit2) baiwen@dshanpi-a1:~/lerobot/rk_lerobot_tools$ ls npu_onnx_export/
new_actions.npy NPU_ACTPolicy_TransformerLayers.rknn NPU_ACTPolicy_VisionEncoder.rknn
NPU_ACTPolicy_TransformerLayers NPU_ACTPolicy_VisionEncoder npu_output
8.端侧部署推理
将转换生成的RKNN模型传输至板端的lerobot/rk_lerobot_tools目录下
baiwen@dshanpi-a1:~/lerobot/rk_lerobot_tools$ tree
.
├── act_cpu_infer.py
├── act_npu_control_arm.py
├── act_npu_OnlyInfer.py
└── npu_onnx_export
├── new_actions.npy
├── NPU_ACTPolicy_TransformerLayers
│ ├── NPU_ACTPolicy_TransformerLayers.onnx
│ └── NPU_ACTPolicy_TransformerLayers.rknn
├── NPU_ACTPolicy_VisionEncoder
│ ├── NPU_ACTPolicy_VisionEncoder.onnx
│ └── NPU_ACTPolicy_VisionEncoder.rknn
└── npu_output
├── action_mean_unnormalize.npy
├── action_std_unnormalize.npy
├── front_mean.npy
├── front_std.npy
├── state_mean.npy
├── state_std.npy
├── up_mean.npy
└── up_std.npy
5 directories, 16 files
将摄像头、舵机控制器连接至板端,连接完成后,运行端侧推理程序:
conda activate lerobot
#执行程序前可能需要提前安装rknn依赖,这里以python10版本为例,如果其他版本请安装其他版本的rknn推理库
cd ~/Projects/rknn-toolkit2/rknn-toolkit-lite2/packages
pip install rknn_toolkit_lite2-2.3.2-cp310-cp310-manylinux_2_17_aarch64.manylinux2014_aarch64.whl
#进入lerobot目录
cd ~/lerobot
#执行
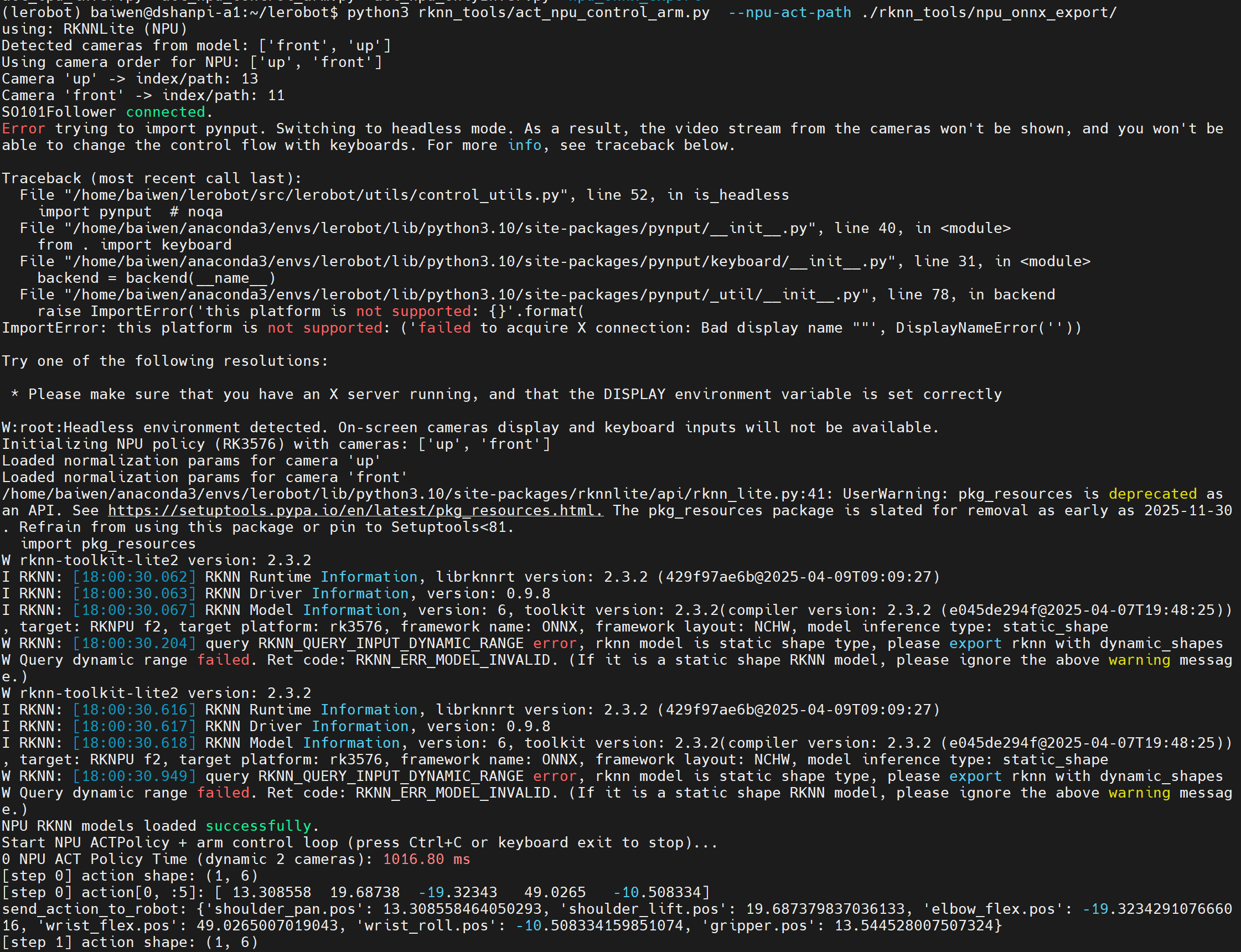
python3 rk_lerobot_tools/act_npu_control_arm.py --npu-act-path ./rk_lerobot_tools/npu_onnx_export/
运行效果如下:
【拓展】YOLOV8-POSE实现跟随
- 获取YOLOV8-POSE模型:v8.2.0
1.ONNX模型导出
from ultralytics import YOLO
# 加载模型
model = YOLO('yolov8n-pose.pt')
# 进行预测并自动保存结果图片
results = model.predict(
source='./bus.jpg',
save=True,
conf=0.5,
show_labels=True,
show_conf=True
)
model.export(
format='onnx',
imgsz=320,
dynamic=True,
simplify=True
)
固定输入尺寸:
python -m onnxsim yolov8n-pose.onnx yolov8n-pose_320_static.onnx --input-shape 1,3,320,320
2.RKNN模型转换
import sys,os
from rknn.api import RKNN
DATASET_PATH = '../../../datasets/COCO/coco_subset_20.txt'
DEFAULT_RKNN_PATH = '../model/yolov8_pose.rknn'
DEFAULT_QUANT = True
def parse_arg():
if len(sys.argv) < 3:
print("Usage: python3 {} onnx_model_path [platform] [dtype(optional)] [output_rknn_path(optional)]".format(sys.argv[0]));
print(" platform choose from [rk3562, rk3566, rk3568, rk3576, rk3588, rv1126b]")
print(" dtype choose from [i8] for [rk3562, rk3566, rk3568, rk3576, rk3588, rv1126b]")
exit(1)
model_path = sys.argv[1]
platform = sys.argv[2]
do_quant = DEFAULT_QUANT
if len(sys.argv) > 3:
model_type = sys.argv[3]
if model_type not in ['i8', 'u8', 'fp']:
print("ERROR: Invalid model type: {}".format(model_type))
exit(1)
elif model_type in ['i8', 'u8']:
do_quant = True
else:
do_quant = False
if len(sys.argv) > 4:
output_path = sys.argv[4]
else:
output_path = DEFAULT_RKNN_PATH
return model_path, platform, do_quant, output_path
if __name__ == '__main__':
model_path, platform, do_quant, output_path = parse_arg()
# Create RKNN object
rknn = RKNN(verbose=False)
# Pre-process config
print('--> Config model')
rknn.config(mean_values=[[0, 0, 0]], std_values=[
[255, 255, 255]], target_platform=platform)
print('done')
# Load model
print('--> Loading model')
ret = rknn.load_onnx(model=model_path)
if ret != 0:
print('Load model failed!')
exit(ret)
print('done')
# Build model
print('--> Building model')
if platform in ["rv1109","rv1126","rk1808"] :
ret = rknn.build(do_quantization=do_quant, dataset=DATASET_PATH, auto_hybrid_quant=True)
else:
if do_quant:
rknn.hybrid_quantization_step1(
dataset=DATASET_PATH,
proposal= False,
custom_hybrid=[['/model.22/cv4.0/cv4.0.0/act/Mul_output_0','/model.22/Concat_6_output_0'],
['/model.22/cv4.1/cv4.1.0/act/Mul_output_0','/model.22/Concat_6_output_0'],
['/model.22/cv4.2/cv4.2.0/act/Mul_output_0','/model.22/Concat_6_output_0']]
)
model_name=os.path.basename(model_path).replace('.onnx','')
rknn.hybrid_quantization_step2(
model_input = model_name+".model", # 表示第一步生成的模型文件
data_input= model_name+".data", # 表示第一步生成的配置文件
model_quantization_cfg=model_name+".quantization.cfg" # 表示第一步生成的量化配置文件
)
else:
ret = rknn.build(do_quantization=do_quant, dataset=DATASET_PATH)
if ret != 0:
print('Build model failed!')
exit(ret)
print('done')
# Export rknn model
print('--> Export rknn model')
ret = rknn.export_rknn(output_path)
if ret != 0:
print('Export rknn model failed!')
exit(ret)
print("output_path:",output_path)
print('done')
# Release
rknn.release()
程序运行:
python3 convert.py ../model/yolov8n-pose.onnx rk3576
3.端侧模型推理
import os
import sys
import urllib
import urllib.request
import time
import numpy as np
import argparse
import cv2,math
from math import ceil
#from rknn.api import RKNN
from rknnlite.api import RKNNLite as RKNN
CLASSES = ['person']
nmsThresh = 0.4
objectThresh = 0.5
def letterbox_resize(image, size, bg_color):
"""
letterbox_resize the image according to the specified size
:param image: input image, which can be a NumPy array or file path
:param size: target size (width, height)
:param bg_color: background filling data
:return: processed image
"""
if isinstance(image, str):
image = cv2.imread(image)
target_width, target_height = size
image_height, image_width, _ = image.shape
# Calculate the adjusted image size
aspect_ratio = min(target_width / image_width, target_height / image_height)
new_width = int(image_width * aspect_ratio)
new_height = int(image_height * aspect_ratio)
# Use cv2.resize() for proportional scaling
image = cv2.resize(image, (new_width, new_height), interpolation=cv2.INTER_AREA)
# Create a new canvas and fill it
result_image = np.ones((target_height, target_width, 3), dtype=np.uint8) * bg_color
offset_x = (target_width - new_width) // 2
offset_y = (target_height - new_height) // 2
result_image[offset_y:offset_y + new_height, offset_x:offset_x + new_width] = image
return result_image, aspect_ratio, offset_x, offset_y
class DetectBox:
def __init__(self, classId, score, xmin, ymin, xmax, ymax, keypoint):
self.classId = classId
self.score = score
self.xmin = xmin
self.ymin = ymin
self.xmax = xmax
self.ymax = ymax
self.keypoint = keypoint
def IOU(xmin1, ymin1, xmax1, ymax1, xmin2, ymin2, xmax2, ymax2):
xmin = max(xmin1, xmin2)
ymin = max(ymin1, ymin2)
xmax = min(xmax1, xmax2)
ymax = min(ymax1, ymax2)
innerWidth = xmax - xmin
innerHeight = ymax - ymin
innerWidth = innerWidth if innerWidth > 0 else 0
innerHeight = innerHeight if innerHeight > 0 else 0
innerArea = innerWidth * innerHeight
area1 = (xmax1 - xmin1) * (ymax1 - ymin1)
area2 = (xmax2 - xmin2) * (ymax2 - ymin2)
total = area1 + area2 - innerArea
return innerArea / total
def NMS(detectResult):
predBoxs = []
sort_detectboxs = sorted(detectResult, key=lambda x: x.score, reverse=True)
for i in range(len(sort_detectboxs)):
xmin1 = sort_detectboxs[i].xmin
ymin1 = sort_detectboxs[i].ymin
xmax1 = sort_detectboxs[i].xmax
ymax1 = sort_detectboxs[i].ymax
classId = sort_detectboxs[i].classId
if sort_detectboxs[i].classId != -1:
predBoxs.append(sort_detectboxs[i])
for j in range(i + 1, len(sort_detectboxs), 1):
if classId == sort_detectboxs[j].classId:
xmin2 = sort_detectboxs[j].xmin
ymin2 = sort_detectboxs[j].ymin
xmax2 = sort_detectboxs[j].xmax
ymax2 = sort_detectboxs[j].ymax
iou = IOU(xmin1, ymin1, xmax1, ymax1, xmin2, ymin2, xmax2, ymax2)
if iou > nmsThresh:
sort_detectboxs[j].classId = -1
return predBoxs
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def softmax(x, axis=-1):
# 将输入向量减去最大值以提高数值稳定性
exp_x = np.exp(x - np.max(x, axis=axis, keepdims=True))
return exp_x / np.sum(exp_x, axis=axis, keepdims=True)
def process(out,keypoints,index,model_w,model_h,stride,scale_w=1,scale_h=1):
xywh=out[:,:64,:]
conf=sigmoid(out[:,64:,:])
out=[]
for h in range(model_h):
for w in range(model_w):
for c in range(len(CLASSES)):
if conf[0,c,(h*model_w)+w]>objectThresh:
xywh_=xywh[0,:,(h*model_w)+w] #[1,64,1]
xywh_=xywh_.reshape(1,4,16,1)
data=np.array([i for i in range(16)]).reshape(1,1,16,1)
xywh_=softmax(xywh_,2)
xywh_ = np.multiply(data, xywh_)
xywh_ = np.sum(xywh_, axis=2, keepdims=True).reshape(-1)
xywh_temp=xywh_.copy()
xywh_temp[0]=(w+0.5)-xywh_[0]
xywh_temp[1]=(h+0.5)-xywh_[1]
xywh_temp[2]=(w+0.5)+xywh_[2]
xywh_temp[3]=(h+0.5)+xywh_[3]
xywh_[0]=((xywh_temp[0]+xywh_temp[2])/2)
xywh_[1]=((xywh_temp[1]+xywh_temp[3])/2)
xywh_[2]=(xywh_temp[2]-xywh_temp[0])
xywh_[3]=(xywh_temp[3]-xywh_temp[1])
xywh_=xywh_*stride
xmin=(xywh_[0] - xywh_[2] / 2) * scale_w
ymin = (xywh_[1] - xywh_[3] / 2) * scale_h
xmax = (xywh_[0] + xywh_[2] / 2) * scale_w
ymax = (xywh_[1] + xywh_[3] / 2) * scale_h
keypoint=keypoints[...,(h*model_w)+w+index]
keypoint[...,0:2]=keypoint[...,0:2]//1
box = DetectBox(c,conf[0,c,(h*model_w)+w], xmin, ymin, xmax, ymax,keypoint)
out.append(box)
return out
pose_palette = np.array([[255, 128, 0], [255, 153, 51], [255, 178, 102], [230, 230, 0], [255, 153, 255],
[153, 204, 255], [255, 102, 255], [255, 51, 255], [102, 178, 255], [51, 153, 255],
[255, 153, 153], [255, 102, 102], [255, 51, 51], [153, 255, 153], [102, 255, 102],
[51, 255, 51], [0, 255, 0], [0, 0, 255], [255, 0, 0], [255, 255, 255]],dtype=np.uint8)
kpt_color = pose_palette[[16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9]]
skeleton = [[16, 14], [14, 12], [17, 15], [15, 13], [12, 13], [6, 12], [7, 13], [6, 7], [6, 8],
[7, 9], [8, 10], [9, 11], [2, 3], [1, 2], [1, 3], [2, 4], [3, 5], [4, 6], [5, 7]]
limb_color = pose_palette[[9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16]]
if __name__ == '__main__':
parser = argparse.ArgumentParser(description='Yolov8 Pose Python Demo', add_help=True)
# basic params
parser.add_argument('--model_path', type=str, required=True,
help='model path, could be .rknn file')
parser.add_argument('--target', type=str,
default='rk3566', help='target RKNPU platform')
parser.add_argument('--device_id', type=str,
default=None, help='device id')
args = parser.parse_args()
# Create RKNN object
rknn = RKNN(verbose=True)
# Load RKNN model
ret = rknn.load_rknn(args.model_path)
if ret != 0:
print('Load RKNN model \"{}\" failed!'.format(args.model_path))
exit(ret)
print('done')
# Init runtime environment
print('--> Init runtime environment')
#ret = rknn.init_runtime(target=args.target, device_id=args.device_id)
ret = rknn.init_runtime();
if ret != 0:
print('Init runtime environment failed!')
exit(ret)
print('done')
# Set inputs
img = cv2.imread('../model/bus.jpg')
letterbox_img, aspect_ratio, offset_x, offset_y = letterbox_resize(img, (640,640), 56) # letterbox缩放
infer_img = letterbox_img[..., ::-1] # BGR2RGB
# Inference
print('--> Running model')
results = rknn.inference(inputs=[infer_img])
outputs=[]
keypoints=results[3]
for x in results[:3]:
index,stride=0,0
if x.shape[2]==20:
stride=32
index=20*4*20*4+20*2*20*2
if x.shape[2]==40:
stride=16
index=20*4*20*4
if x.shape[2]==80:
stride=8
index=0
feature=x.reshape(1,65,-1)
output=process(feature,keypoints,index,x.shape[3],x.shape[2],stride)
outputs=outputs+output
predbox = NMS(outputs)
for i in range(len(predbox)):
xmin = int((predbox[i].xmin-offset_x)/aspect_ratio)
ymin = int((predbox[i].ymin-offset_y)/aspect_ratio)
xmax = int((predbox[i].xmax-offset_x)/aspect_ratio)
ymax = int((predbox[i].ymax-offset_y)/aspect_ratio)
classId = predbox[i].classId
score = predbox[i].score
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), (0, 255, 0), 2)
ptext = (xmin, ymin)
title= CLASSES[classId] + "%.2f" % score
cv2.putText(img, title, ptext, cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2, cv2.LINE_AA)
keypoints =predbox[i].keypoint.reshape(-1, 3) #keypoint [x, y, conf]
keypoints[...,0]=(keypoints[...,0]-offset_x)/aspect_ratio
keypoints[...,1]=(keypoints[...,1]-offset_y)/aspect_ratio
for k, keypoint in enumerate(keypoints):
x, y, conf = keypoint
color_k = [int(x) for x in kpt_color[k]]
if x != 0 and y != 0:
cv2.circle(img, (int(x), int(y)), 5, color_k, -1, lineType=cv2.LINE_AA)
for k, sk in enumerate(skeleton):
pos1 = (int(keypoints[(sk[0] - 1), 0]), int(keypoints[(sk[0] - 1), 1]))
pos2 = (int(keypoints[(sk[1] - 1), 0]), int(keypoints[(sk[1] - 1), 1]))
conf1 = keypoints[(sk[0] - 1), 2]
conf2 = keypoints[(sk[1] - 1), 2]
if pos1[0] == 0 or pos1[1] == 0 or pos2[0] == 0 or pos2[1] == 0:
continue
cv2.line(img, pos1, pos2, [int(x) for x in limb_color[k]], thickness=2, lineType=cv2.LINE_AA)
cv2.imwrite("./result.jpg", img)
print("save image in ./result.jpg")
# Release
rknn.release()
程序运行:
python3 yolov8_pose.py --model_path ../model/yolov8_pose.rknn --target rk3576
4.Lerobot程序运行
程序运行示例:
python3 yolov8pose_head_follow_so101.py --show
程序源码示例:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import time
import argparse
import os
import cv2
import numpy as np
import torch
from lerobot.cameras.opencv.configuration_opencv import OpenCVCameraConfig
from lerobot.robots.so101_follower.config_so101_follower import SO101FollowerConfig
from lerobot.robots.so101_follower.so101_follower import SO101Follower
from lerobot.utils.control_utils import init_keyboard_listener
from math import ceil
# 人体姿态检测,使用YOLOv8-Pose模型
from rknnlite.api import RKNNLite as RKNN
CLASSES = ['person']
nmsThresh = 0.4
objectThresh = 0.5
# 中心区域的定义,用于判断是否需要移动机械臂
CENTER_X_MIN = 0.3 # 画面宽度的30%
CENTER_X_MAX = 0.7 # 画面宽度的70%
CENTER_Y_MIN = 0.3 # 画面高度的30%
CENTER_Y_MAX = 0.7 # 画面高度的70%
# 启动时的舵机位置
HOME_POSE_DEG = {
'shoulder_pan.pos': 0.0, # 左右正中
'shoulder_lift.pos': 30.0, # 手稍微抬起
'elbow_flex.pos': -65.0, # 肘略弯
'wrist_flex.pos': 50.0, # 手腕稍微向下
'wrist_roll.pos': 20.0, # 手腕水平
'gripper.pos': 0.0, # 夹爪先不动
}
# 归位时的舵机位置
ZORE_POSE_DEG = {
'shoulder_pan.pos': -10.0, # 左右正中
'shoulder_lift.pos': -5.0, # 手稍微抬起
'elbow_flex.pos': -5.0, # 肘略弯
'wrist_flex.pos': 70.0, # 手腕稍微向下
'wrist_roll.pos': 10.0, # 手腕水平
'gripper.pos': 0.0, # 夹爪先不动
}
EMA_ALPHA = 0.15 # 0.15~0.35 越小越稳但越慢
# === 辅助函数 ===
def build_home_pose(joint_names):
"""
根据 joint_names 构造一个 Home Pose 向量(torch.Tensor, shape=[1, action_dim], 单位:度)
没在 HOME_POSE_DEG 里定义的关节就默认为 0 度。
"""
import torch
action_dim = len(joint_names)
home = torch.zeros(1, action_dim, dtype=torch.float32)
for i, name in enumerate(joint_names):
if name in HOME_POSE_DEG:
home[0, i] = HOME_POSE_DEG[name]
else:
home[0, i] = 0.0
return home # 确保返回 home
def build_zero_pose(joint_names):
"""
根据 joint_names 构造一个 Home Pose 向量(torch.Tensor, shape=[1, action_dim], 单位:度)
没在 ZORE_POSE_DEG 里定义的关节就默认为 0 度。
"""
import torch
action_dim = len(joint_names)
home = torch.zeros(1, action_dim, dtype=torch.float32)
for i, name in enumerate(joint_names):
if name in ZORE_POSE_DEG:
home[0, i] = ZORE_POSE_DEG[name]
else:
home[0, i] = 0.0
return home
def letterbox_resize(image, size, bg_color):
"""
按照目标大小调整图像,保持长宽比不变。
"""
if isinstance(image, str):
image = cv2.imread(image)
target_width, target_height = size
image_height, image_width, _ = image.shape
aspect_ratio = min(target_width / image_width, target_height / image_height)
new_width = int(image_width * aspect_ratio)
new_height = int(image_height * aspect_ratio)
image = cv2.resize(image, (new_width, new_height), interpolation=cv2.INTER_AREA)
result_image = np.ones((target_height, target_width, 3), dtype=np.uint8) * bg_color
offset_x = (target_width - new_width) // 2
offset_y = (target_height - new_height) // 2
result_image[offset_y:offset_y + new_height, offset_x:offset_x + new_width] = image
return result_image, aspect_ratio, offset_x, offset_y
class DetectBox:
def __init__(self, classId, score, xmin, ymin, xmax, ymax, keypoint):
self.classId = classId
self.score = score
self.xmin = xmin
self.ymin = ymin
self.xmax = xmax
self.ymax = ymax
self.keypoint = keypoint
def IOU(xmin1, ymin1, xmax1, ymax1, xmin2, ymin2, xmax2, ymax2):
xmin = max(xmin1, xmin2)
ymin = max(ymin1, ymin2)
xmax = min(xmax1, xmax2)
ymax = min(ymax1, ymax2)
innerWidth = xmax - xmin
innerHeight = ymax - ymin
innerWidth = innerWidth if innerWidth > 0 else 0
innerHeight = innerHeight if innerHeight > 0 else 0
innerArea = innerWidth * innerHeight
area1 = (xmax1 - xmin1) * (ymax1 - ymin1)
area2 = (xmax2 - xmin2) * (ymax2 - ymin2)
total = area1 + area2 - innerArea
return innerArea / total
def NMS(detectResult):
predBoxs = []
sort_detectboxs = sorted(detectResult, key=lambda x: x.score, reverse=True)
for i in range(len(sort_detectboxs)):
xmin1 = sort_detectboxs[i].xmin
ymin1 = sort_detectboxs[i].ymin
xmax1 = sort_detectboxs[i].xmax
ymax1 = sort_detectboxs[i].ymax
classId = sort_detectboxs[i].classId
if sort_detectboxs[i].classId != -1:
predBoxs.append(sort_detectboxs[i])
for j in range(i + 1, len(sort_detectboxs), 1):
if classId == sort_detectboxs[j].classId:
xmin2 = sort_detectboxs[j].xmin
ymin2 = sort_detectboxs[j].ymin
xmax2 = sort_detectboxs[j].xmax
ymax2 = sort_detectboxs[j].ymax
iou = IOU(xmin1, ymin1, xmax1, ymax1, xmin2, ymin2, xmax2, ymax2)
if iou > nmsThresh:
sort_detectboxs[j].classId = -1
return predBoxs
def process(out,keypoints,index,model_w,model_h,stride,scale_w=1,scale_h=1):
xywh=out[:,:64,:]
conf=sigmoid(out[:,64:,:])
out=[]
for h in range(model_h):
for w in range(model_w):
for c in range(len(CLASSES)):
if conf[0,c,(h*model_w)+w]>objectThresh:
xywh_=xywh[0,:,(h*model_w)+w] #[1,64,1]
xywh_=xywh_.reshape(1,4,16,1)
data=np.array([i for i in range(16)]).reshape(1,1,16,1)
xywh_=softmax(xywh_,2)
xywh_ = np.multiply(data, xywh_)
xywh_ = np.sum(xywh_, axis=2, keepdims=True).reshape(-1)
xywh_temp=xywh_.copy()
xywh_temp[0]=(w+0.5)-xywh_[0]
xywh_temp[1]=(h+0.5)-xywh_[1]
xywh_temp[2]=(w+0.5)+xywh_[2]
xywh_temp[3]=(h+0.5)+xywh_[3]
xywh_[0]=((xywh_temp[0]+xywh_temp[2])/2)
xywh_[1]=((xywh_temp[1]+xywh_temp[3])/2)
xywh_[2]=(xywh_temp[2]-xywh_temp[0])
xywh_[3]=(xywh_temp[3]-xywh_temp[1])
xywh_=xywh_*stride
xmin=(xywh_[0] - xywh_[2] / 2) * scale_w
ymin = (xywh_[1] - xywh_[3] / 2) * scale_h
xmax = (xywh_[0] + xywh_[2] / 2) * scale_w
ymax = (xywh_[1] + xywh_[3] / 2) * scale_h
keypoint=keypoints[...,(h*model_w)+w+index]
keypoint[...,0:2]=keypoint[...,0:2]//1
box = DetectBox(c,conf[0,c,(h*model_w)+w], xmin, ymin, xmax, ymax,keypoint)
out.append(box)
return out
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def softmax(x, axis=-1):
exp_x = np.exp(x - np.max(x, axis=axis, keepdims=True))
return exp_x / np.sum(exp_x, axis=axis, keepdims=True)
def go_to_home_pose(robot, joint_names, duration=2.0, steps=50):
"""
从当前姿态“平滑地”插值到 Home Pose。
"""
import torch
action_dim = len(joint_names)
home = build_home_pose(joint_names)
obs = robot.get_observation()
current = torch.zeros(1, action_dim, dtype=torch.float32)
for i, name in enumerate(joint_names):
if name in obs:
current[0, i] = float(obs[name])
else:
current[0, i] = 0.0
for k in range(steps):
alpha = float(k + 1) / float(steps)
action = (1.0 - alpha) * current + alpha * home
send_action_to_robot(robot, action)
time.sleep(duration / steps)
return action # 需要返回action
def go_to_zero_pose(robot, joint_names, duration=2.0, steps=50):
"""
从当前姿态“平滑地”插值到 Zero Pose(归位)。
"""
import torch
action_dim = len(joint_names)
zero_pose = build_zero_pose(joint_names)
obs = robot.get_observation()
current = torch.zeros(1, action_dim, dtype=torch.float32)
for i, name in enumerate(joint_names):
if name in obs:
current[0, i] = float(obs[name])
else:
current[0, i] = 0.0
for k in range(steps):
alpha = float(k + 1) / float(steps)
action = (1.0 - alpha) * current + alpha * zero_pose
send_action_to_robot(robot, action)
time.sleep(duration / steps)
def move_arm_based_on_pose(current_action, pan_center, shoulder_center, elbow_center, wrist_roll_center, ex, ey, box_width, frame_width):
"""
根据检测到的人体位置偏差,控制整个机械臂。
"""
target_action = current_action.clone()
# --- 引入控制死区 (Dead Zone) ---
# 如果误差在±DEAD_ZONE像素以内,就认为已经对准,不进行移动,防止抖动。
DEAD_ZONE_X = 25 # 水平方向死区(像素),可根据画面宽度调整
DEAD_ZONE_Y = 35 # 垂直方向死区(像素),可根据画面高度调整
if abs(ex) > DEAD_ZONE_X:
# 水平方向控制 (Pan)
pan_gain = 0.01
pan_offset = ex * pan_gain
# *** 修改点:将减号改回加号来修正方向 ***
target_action[0, 0] = np.clip(current_action[0, 0] + pan_offset, pan_center - 90, pan_center + 90)
# 垂直方向控制 (Shoulder and Elbow)
if abs(ey) > DEAD_ZONE_Y:
shoulder_gain = 0.01
elbow_gain = 0.01
shoulder_offset = ey * shoulder_gain
elbow_offset = ey * elbow_gain
target_action[0, 1] = np.clip(current_action[0, 1] + shoulder_offset, shoulder_center - 45, shoulder_center + 45)
target_action[0, 2] = np.clip(current_action[0, 2] + elbow_offset, elbow_center - 45, elbow_center + 45)
# 距离控制暂时保持注释,以避免干扰
'''
distance_gain = 0.1
base_width = frame_width / 3
distance_error = box_width - base_width
distance_offset = distance_error * distance_gain
target_action[0, 2] += distance_offset
target_action[0, 3] -= distance_offset
'''
return target_action
def send_action_to_robot(robot, action):
"""
将“关节角度(度)”映射成 LeRobot 的键值 dict,然后 robot.send_action()
"""
# 如果 action 是 torch.Tensor 类型
if isinstance(action, torch.Tensor):
action_np = action.detach().cpu().numpy().reshape(-1)
else:
# 如果 action 是 numpy.ndarray 类型,直接 reshape
action_np = action.reshape(-1)
joint_names = list(robot.action_features.keys())
if len(joint_names) != len(action_np):
print(f"[WARN] action dim = {len(action_np)}, but robot has {len(joint_names)} action_features:")
print(" joint_names =", joint_names)
n = min(len(joint_names), len(action_np))
else:
n = len(joint_names)
# 创建字典,将 action_np 转换为字典格式
robot_action = {
joint_names[i]: float(action_np[i])
for i in range(n)
}
print("send_action_to_robot:", robot_action)
robot.send_action(robot_action)
pose_palette = np.array([[255, 128, 0], [255, 153, 51], [255, 178, 102], [230, 230, 0], [255, 153, 255],
[153, 204, 255], [255, 102, 255], [255, 51, 255], [102, 178, 255], [51, 153, 255],
[255, 153, 153], [255, 102, 102], [255, 51, 51], [153, 255, 153], [102, 255, 102],
[51, 255, 51], [0, 255, 0], [0, 0, 255], [255, 0, 0], [255, 255, 255]],dtype=np.uint8)
kpt_color = pose_palette[[16, 16, 16, 16, 16, 0, 0, 0, 0, 0, 0, 9, 9, 9, 9, 9, 9]]
skeleton = [[16, 14], [14, 12], [17, 15], [15, 13], [12, 13], [6, 12], [7, 13], [6, 7], [6, 8],
[7, 9], [8, 10], [9, 11], [2, 3], [1, 2], [1, 3], [2, 4], [3, 5], [4, 6], [5, 7]]
limb_color = pose_palette[[9, 9, 9, 9, 7, 7, 7, 0, 0, 0, 0, 0, 16, 16, 16, 16, 16, 16, 16]]
def search_for_person(robot, joint_names, search_pan, search_dir, pan_center, SEARCH_PAN_RANGE, SEARCH_STEP_DEG, target_action):
"""
Function to perform the search for a person.
- It scans the environment by moving the robot's arm until a person is detected.
- Once the robot finishes the scan, it will continue scanning in the opposite direction.
Arguments:
- robot: The robot object controlling the arm.
- joint_names: List of joint names to control.
- search_pan: The current pan position of the robot's arm.
- search_dir: Direction in which the robot is searching (1 for right, -1 for left).
- pan_center: The center pan position where the robot starts scanning.
- SEARCH_PAN_RANGE: The maximum range for the search.
- SEARCH_STEP_DEG: The step in degrees for each frame during the search.
- target_action: The target action representing the robot's movement.
Returns:
- The updated target_action with the new shoulder_pan position.
"""
# Update search pan to simulate the scanning motion
search_pan += search_dir * SEARCH_STEP_DEG
# Check if the pan position is beyond the range and reverse direction if necessary
if search_pan > pan_center + SEARCH_PAN_RANGE:
search_pan = pan_center + SEARCH_PAN_RANGE
search_dir = -1.0 # Change direction to left
elif search_pan < pan_center - SEARCH_PAN_RANGE:
search_pan = pan_center - SEARCH_PAN_RANGE
search_dir = 1.0 # Change direction to right
# Update the shoulder pan position in the target action
idx_map = {n: i for i, n in enumerate(joint_names)}
if 'shoulder_pan.pos' in idx_map:
target_action[0, idx_map['shoulder_pan.pos']] = float(search_pan)
# Send the action to the robot
send_action_to_robot(robot, target_action)
return target_action, search_pan, search_dir
# === 主循环 ===
def main():
parser = argparse.ArgumentParser()
parser.add_argument('--model_path', type=str, default='./model/yolov8_pose.rknn', help='模型路径,使用姿态检测模型')
parser.add_argument('--cam-id', type=int, default=11)
parser.add_argument('--fps', type=int, default=30)
parser.add_argument('--port', type=str, default='/dev/ttyACM0')
parser.add_argument('--width', type=int, default=640)
parser.add_argument('--height', type=int, default=480)
parser.add_argument('--show', action='store_true', help='是否显示预览图像')
opt = parser.parse_args()
# 加载YOLOv8 Pose模型
print("加载YOLOv8 Pose模型...")
pose_rknn = RKNN(verbose=False)
assert pose_rknn.load_rknn(opt.model_path) == 0, "加载模型失败"
assert pose_rknn.init_runtime() == 0, "初始化失败"
# 打开摄像头
cap = cv2.VideoCapture(opt.cam_id)
if not cap.isOpened():
print("无法打开摄像头")
return
# 初始化机器人
robot_cfg = SO101FollowerConfig(
port=opt.port,
id="follower_arm",
cameras={},
use_degrees=True,
)
robot = SO101Follower(robot_cfg)
robot.connect()
joint_names = list(robot.action_features.keys())
action_dim = len(joint_names)
print("开始跟踪循环...")
# 启动时回到Home位置
target_action = go_to_home_pose(robot, joint_names, duration=2.0, steps=50)
print("Home target_action (deg):", target_action[0, :].numpy())
# 用 Home Pose 作为中心(pan_center / shoulder_center 等)
idx_map = {n: i for i, n in enumerate(joint_names)}
pan_center = HOME_POSE_DEG.get('shoulder_pan.pos', 0.0)
shoulder_center = HOME_POSE_DEG.get('shoulder_lift.pos', 0.0)
elbow_center = HOME_POSE_DEG.get('elbow_flex.pos', 0.0)
wrist_roll_center = HOME_POSE_DEG.get('wrist_roll.pos', 0.0)
print(f"Centers: pan={pan_center:.1f}, shoulder={shoulder_center:.1f}, "
f"elbow={elbow_center:.1f}, wrist_roll={wrist_roll_center:.1f}")
# 6) 键盘监听(可选,headless 环境只是提示 warning)
listener, events = init_keyboard_listener()
period = 1.0 / opt.fps
print("Start face-pose-follow control loop... (Ctrl+C to stop)")
# ===== 搜索模式状态 =====
miss_count = 0
hit_count = 0
MISS_TO_SEARCH = 8 # 连续多少帧没检测到脸 -> 进入搜索
HIT_TO_CONFIRM_TRACK = 3 # 连续多少帧检测到目标 -> 才开始移动和跟踪
last_face_time = time.time() # 最近一次检测到脸的时间
LOST_TIMEOUT = 3.0 # 连续 2 秒都没检测到脸,才开始扫描(建议 1.5~3.0)
search_mode = False
search_dir = 1.0 # +1 向右扫, -1 向左扫
search_pan = pan_center # 当前搜索时的 pan 目标
SEARCH_PAN_RANGE = 45.0 # 搜索左右扫的范围(相对 pan_center)
SEARCH_STEP_DEG = 2.0 # 每帧扫多少度(与你 fps 有关)
ex_f, ey_f = 0.0, 0.0
step = 0
last_box = None
try:
while True:
ret, frame = cap.read()
if not ret:
break
h, w, _ = frame.shape
# 1. 人体姿态检测(YOLOv8 Pose)
infer_img, ar, off_x, off_y = letterbox_resize(frame, (640, 640), 56)
infer_img = infer_img[..., ::-1] # BGR -> RGB
infer_img = np.expand_dims(infer_img, axis=0)
results = pose_rknn.inference(inputs=[infer_img])
outputs = []
keypoints = results[3] # 提取关键点
for x in results[:3]:
idx, stride = 0, 0
if x.shape[2] == 20:
stride, idx = 32, 20*4*20*4 + 20*2*20*2
elif x.shape[2] == 40:
stride, idx = 16, 20*4*20*4
elif x.shape[2] == 80:
stride, idx = 8, 0
feature = x.reshape(1, 65, -1)
outputs += process(feature, keypoints, idx,
x.shape[3], x.shape[2], stride)
predbox = NMS(outputs)
best_box = None
if predbox:
# 寻找最大的检测框
best_box = max(predbox, key=lambda box: (box.xmax - box.xmin) * (box.ymax - box.ymin))
if best_box:
xmin = int((best_box.xmin - off_x) / ar)
ymin = int((best_box.ymin - off_y) / ar)
xmax = int((best_box.xmax - off_x) / ar)
ymax = int((best_box.ymax - off_y) / ar)
cv2.rectangle(frame, (xmin, ymin), (xmax, ymax), (0, 255, 0), 2)
cv2.putText(frame, f"{CLASSES[best_box.classId]}:{best_box.score:.2f}",
(xmin, ymin - 5), cv2.FONT_HERSHEY_SIMPLEX,
0.7, (0, 0, 255), 2, cv2.LINE_AA)
kpts = best_box.keypoint.reshape(-1, 3)
kpts[..., 0] = (kpts[..., 0] - off_x) / ar
kpts[..., 1] = (kpts[..., 1] - off_y) / ar
# 画点
for k, (x_k, y_k, conf) in enumerate(kpts):
if x_k != 0 and y_k != 0:
cv2.circle(frame, (int(x_k), int(y_k)), 5,
[int(c) for c in kpt_color[k]], -1)
# 画骨架
for k, sk in enumerate(skeleton):
pos1 = (int(kpts[sk[0]-1, 0]), int(kpts[sk[0]-1, 1]))
pos2 = (int(kpts[sk[1]-1, 0]), int(kpts[sk[1]-1, 1]))
if 0 in pos1 + pos2:
continue
cv2.line(frame, pos1, pos2,
[int(c) for c in limb_color[k]], 2, cv2.LINE_AA)
# 当人物在中心区域时,进入正常跟踪模式
search_mode = False
hit_count += 1
miss_count = 0
last_face_time = time.time()
# === 新增逻辑:只有当连续命中次数达到阈值后,才移动机械臂 ===
if hit_count >= HIT_TO_CONFIRM_TRACK:
center_x = (xmin + xmax) / 2
center_y = (ymin + ymax) / 2
box_width = xmax - xmin
ex = center_x - w / 2
ey = center_y - h / 2
# 使用 EMA 平滑误差
ex_f = EMA_ALPHA * ex + (1 - EMA_ALPHA) * ex_f
ey_f = EMA_ALPHA * ey + (1 - EMA_ALPHA) * ey_f
# 移动机械臂来调整摄像头位置
target_action = move_arm_based_on_pose(target_action, pan_center, shoulder_center, elbow_center, wrist_roll_center, ex_f, ey_f, box_width, w)
send_action_to_robot(robot, target_action)
else:
hit_count = 0
miss_count += 1
if miss_count > MISS_TO_SEARCH and time.time() - last_face_time > LOST_TIMEOUT:
search_mode = True
# 搜索模式
if search_mode:
target_action, search_pan, search_dir = search_for_person(
robot, joint_names, search_pan, search_dir, pan_center, SEARCH_PAN_RANGE, SEARCH_STEP_DEG, target_action
)
# 3. 显示结果
if opt.show: # 如果--show参数为True,才显示预览图像
cv2.imshow("Pose Detection and Arm Control", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
finally:
try:
# 程序结束时,回归零位置
go_to_zero_pose(robot, joint_names, duration=2.0, steps=50)
except KeyboardInterrupt:
print("程序被中断,回到初始位置")
cap.release()
cv2.destroyAllWindows()
pose_rknn.release()
robot.disconnect()
if opt.show:
cv2.destroyAllWindows()
print("Resources released, exit.")
if __name__ == '__main__':
main()